Advanced technique
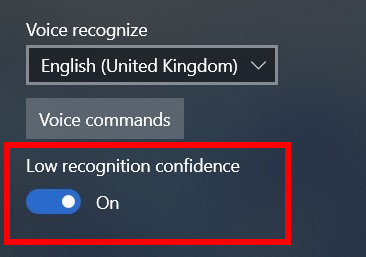
Low recognition and confidence
When you speak a phrase, it's judged as a reject or low, middle, high within recognition confidence levels.
And recognition feature usually gets a phrase of middle or high and processed.
If you will switch to on, it's possible to process low recognition confidence text.
So, try to switch to on if you can't let it recognize any phrases well. (default: off)
And probably this feature is effective if you try to speak non native language.
Tello's Log File
Tello sends own status around 100 msec cycle.
Drooone app uses its status too.
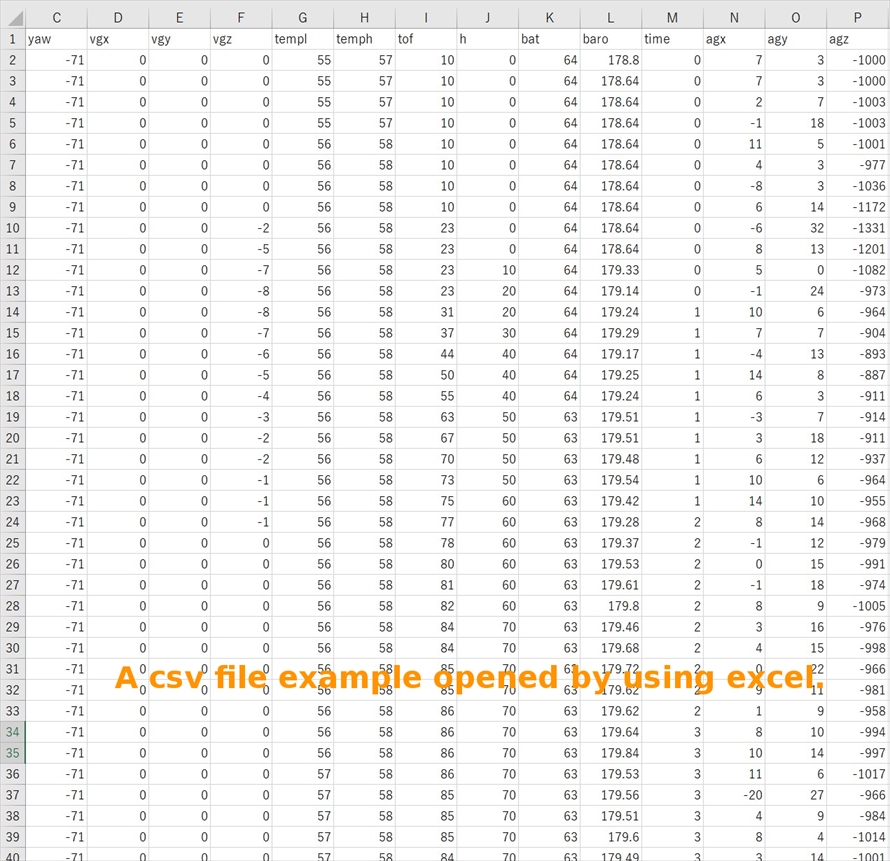
It is possible to output as a csv file.
Output items are as follows.
| pitch |
Pitching. (unit: degree) |
|---|---|
| roll |
Rolling. (unit: degree) |
| yaw |
Yawing. (unit: degree) |
| vgx | Verocity against x axis? unit: ? |
| vgy | Verocity against y axis? unit: ? |
| vgz | Verocity against z axis? unit: ? |
| ★templ | Lowest temperature. (unit: celsius degree) |
| temph | Highest temperature. (unit: celsius degree) |
| tof |
TOF (time of flight). (unit: cm) It's a calculated distance using elapsed time until to return when a laser beam reflect by LED irradiating. |
| ★h | Altitude. (unit: cm) |
| ★bat | Amount of the remaining battery. (unit: %) |
| baro | It's a calculated distance using barometer measurement. (unit: cm) |
| time |
It' a elapsed time while motors are in working. (unit: sec) The value is zero before take off. and after to land, it will be not incremented in a matter of time. |
| agx | It's a acceleration on a x axis. (unit: ?) |
| agy | It's a acceleration on a y axis. (unit: ?) |
| agz | It's a acceleration on a z axis. (unit: ?) |
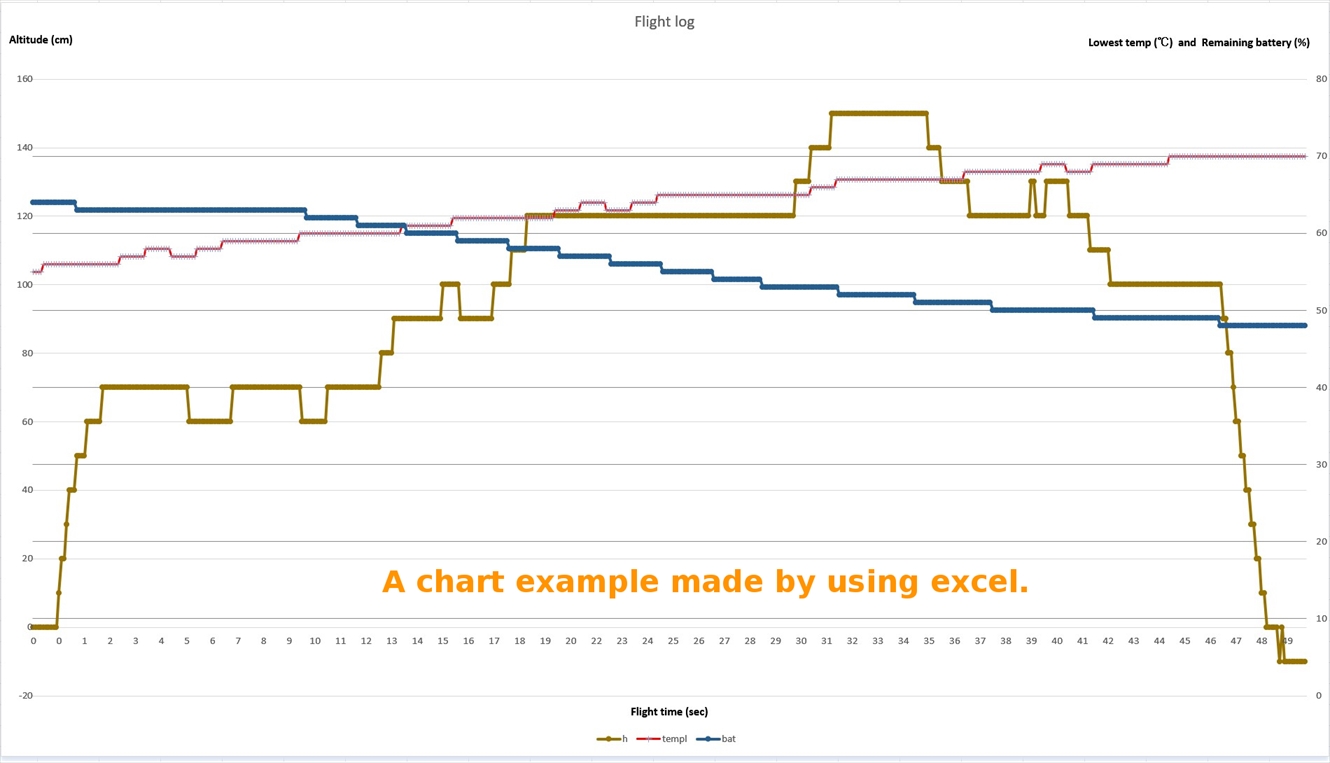
★: These items are used to show by Drooone app. (Update at 1 second intervals.)
Examples of using a csv file.
Tello's Official SDK
When you want to develop using Tello's official sdk with care.
I have understood some specifications is not good.
When in develop, I have been disappointed by them.
Maybe In case of you try a little programming using the SDK, It's no problem so much.
But if you try to develop a full-scale, care to the following issues.
-
It's not good response specifications using multiple sockets.
When i have sent some commands using multi sockets, all responses were received to first connected socket.
I think that responses have to send to each connected socket. -
When Tello is on the move, it won't be able to accept any interruption commands.
The SDK doesn't accept any interruption commands until send a response. It will be rejected.
A response is sent only after finished to move. And also, if you send before receive a response, probably it will be uncontrollable.
So, I have implemented a feature of "scale of the flight". -
A 'rc a b c d' command doesn't return a response.
The specifications about returning a response has been written on the SDK specifications document. When i send its command, Tello moves for specified direction, but not stop. and it eventually does automatic landing on its own.
For example, I send a 'rc 20 0 0 0' command. Tello moves to right but not stop and no responses too. And i send a 'rc 0 0 0 0' command to interrupt, but it still not stop and no response too. After all it eventually does automatic landing on its own.
I made a mistake? or it's bugs? -
Standard Tello commands and Tello EDU commands are different.
For example, Standard Tello doesn't has a stop command.
-
Video image quality has grown worse and worse.
1290 * 720 (Avg bitrate: around 8Mbps) -> 960 * 720 (Avg bitrate: around 3Mbps)
-
The SDK doesn't have any commands to get a photo.
It's so terrible, especially the No.1 and 2.